ITEM AVAILABLE FOR NEXT DAY SHIPPING CANADA & USA.
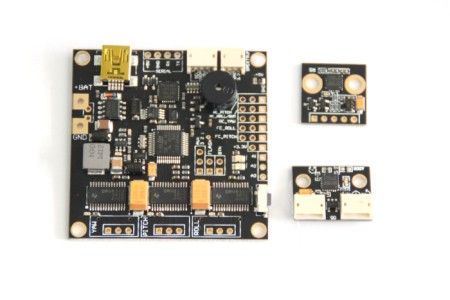
32-bit MCU — ARM Cortex M4. Effectively calculates the complex tasks for 3-axes stabilization Pre-Order! Start Shipping April 8th 2014
Allows camera control with the RC or analog joystick.
Use several switchable profiles for different modes of operation
Supports variety of RC protocols: PWM, Sum-PPM, spektrum and s-bus.
Battery voltage monitoring, compensating voltage drop in the PID-regulator.
Low battery alarm (output to 5V active buzzer).
Increased number of inputs for controlling signals + 3 additional reserved input/output AUX1-AUX3.
Can supply up to 1 amp current for external devices on the 5V power line.
Dedicated UART-socket to connect optional Bluetooth module
Reverse-polarity protection, overheat and overcurrent protection
USB interface for the PC connection, to configure, control and upgrade firmware.
Graphical user interface to manage the settings. Windows / OS X / Linux versions.
Control through the Serial-protocol using dedicated API.
Improved attitude estimation algorythms
Optional second IMU, that will increase the short-term precision of the stabilization 10x-30x times and will make stable work in any frame position.
SPECIFICATIONS
Size of the board: 50×50 mm
Distance between the mounting holes: 45 mm
Diameter of the mounting holes: 3 mm
Power supply voltage: 8–25 V
Maximum motor current: 1,5 A
5V output current to power external devices: up to 1 A
2.50b3
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_50b3.zip (8Mb 14.04.2015)
User Manual (English): SimpleBGC_32bit_manual_2_50_eng.pdf (1Mb 3.04.2015)
- User-written scripts (see Language Reference and user manual)
- IMU temperature calibration and compensation.
- New tool "Analyze" to make analysis of system response.
- Notch filters have adjustable gain (0�100%)
- "Motor outputs" settings group is changed to per-profile basis
- GUI and firmware support Bluetooth Low-Energy (BLE) module communication (experimental)
- New
setting group "Outer PI controller" to adjust values for outer
(cascade) PI controller (default value is 100 suit most setups)
- New option "Swap frame and main sensors" to use frame IMU as main IMU and vice versa
- New option "Gyro deadband" to cut off gyro noise around zero (that may be audible as 'white noise' in heavy setups)
- New option "I2C high-speed". Use it carefuly: high speed mode may cause I2C errors.
Bugfixes:
- Problem with SSL connection during firmware upgrade is solved
- Frame upside-down command loads default profile after reset
- frame upside-down detection doesn't work if "skip gyro calibration" is disabled.
- acceleration limiter does not work properly with the big speed setting in the "Follow" mode: camera overshoots target position
ENCODER version:
- New encoder type "Analog". See updated manual http://www.basecamelectronics.com/files/SimpleBGC_32bit_Encoders.pdf
- Different encoder types may be assigned to different axis
- Option to adjust sound volume in the 'beep by motors' mode in the 'Service' tab
- Bug fixed: frame upside-down switching is not correct
- Several bugs fixed related to encoder calibration