Developed based on MIT cheetah quadruped robot Electric drive robot MIC-01A Mini Cheetah Bionic robot this is for All the parts to build you own MIT cheetah robot you assemble your self requires technical knowledge and programing designed as a kit with all the parts needed to build open source robot 12 encoder gear motors , frame and controllers CAN BUS and RS485. 6S Battery's not included can be added for extra cost
Express shipping only by DHL/FedEx INT $60 - $160
Please note: This product is a custom order product with no quality hardware grantee. Once sold, it can not be returned 30 day grantee on motors and controllers!
Delivery time 30 days ( DYI custom products, KIT)
This product is based on the MIT Cheetah quadruped robot Mini Cheetah, and related resources are also open source according to relevant agreements.
Machine dog product parameters development support
Dimensions: length 500mm width 240mm standing height 300mm
Weight: with battery 9KG Model: MIC-01A
Function: walking, running, turning, posture, balance, backflip, falling, climbing
Uses: University research laboratories Home security Military fire AI training Machine learning Algorithm verification
Body structure: collimated drive planetary deceleration structure
Dynamic performance: ankle joint, thigh joint 18 Nm, knee joint 28 Nm
Maximum angular velocity of the joint: 5 laps per second
Maximum load: 3.5 kg
Endurance performance: standing position 3 hours continuous walking 90 minutes
Action master controller: STM32H743 Main frequency: 400MH Operating system: UCOS
System task switching: 1KHZ power unit and master communication mode: CAN
Control and feedback update rate: 1KHZ
Top-level host controller: Intel X86 system Operating system: ROS, Windows or Liunx
Open interface: up to gait, attitude balance, down to motor drive, full open source
Key parameters of the power module: single joint supply voltage 12-24V, average maximum power 200W, peak maximum 500W
Joint position error is less than 0.15 degrees, and the instantaneous impact resistance is 3 times the maximum average torque
Product Type: Small and medium agile Delivery period: 1 month
Delivery list: one machine dog, one set of lithium battery charger, one set of remote control, one set of basic source code,
Simulation debugging kit, one 3000 watt adjustable power supply, one package, one instruction manual
About after-sales: technical support form, mail, phone, site, official website forum, etc.
About warranty: one year warranty for damage caused by non-human or super mechanical electrical
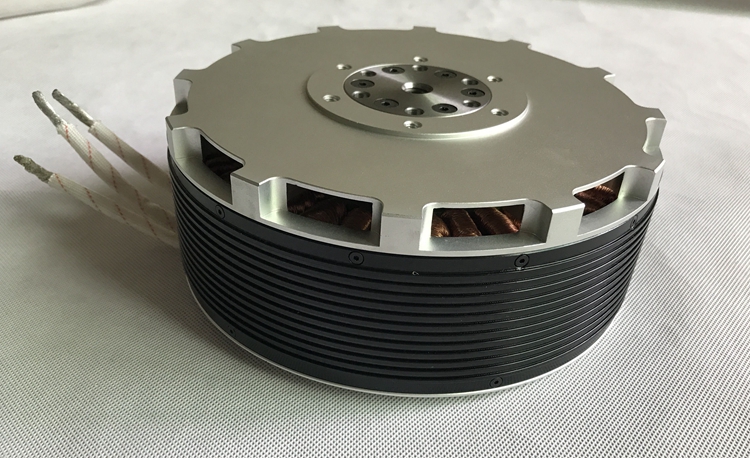
V3 motor
The main function of the motor is to generate driving torque. As a power source for electrical
appliances or various machines, its main
The role is to use mechanical energy to convert into electrical energy.
Rated voltage: 12-24V Rated current: 15A
Peak current: 30A After deceleration, end speed: 5 laps per second maximum
Reduction ratio: 6 times Weight: 500g
Color: black oxide, natural silver
Motor torque: 3NM Maximum deceleration torque: 18NM max
Limit temperature: less than 85 degrees Positioning accuracy error: less than 0.15 degrees
Resistance to transient shock: 70NM
Input port: DC power port Communication port: CAN port Debug port: USB
Motor body classification: open hollow and three-proof full closure
Torque output mode: flange plus positioning pin M4 locking screw
Axial impact resistance: 800 cattle Reducer structure: single-stage planetary structure
Motor grade logarithm: 21 pairs Motor type: three-phase disc outer rotor motor
Control mode: speed torque position control via CAN control
Control the uplink speed: 1KHZ feedback downlink speed: 1KHZ
Firmware update mode: support CAN online update
Current Protection: Hardware 35A 200ms Automatic Protection
Motor speed: 24V 2100 rpm Reducer life: 10000 hours
Housing material: high hardness aluminum alloy 7075
Drive type: Built-in FOC control board, instantaneous overcurrent maximum 180A
Intellectual property rights: self-improvement and innovation, no disputes, support for export
Basic geometry: diameter 90 mm, axial thickness 41 mm
Warranty period: non-human or overloaded, one year warranty (excluding postage)
The standing posture is much lower than the expected power consumption, only about 40 watts. The 140WH built-in battery can stand for at least 3 hours and the walk is expected to be no less than 1.5 hours.
configuration example CAN BUS MIT driver servo Motor
list of robot servo motors available for sale with sects MIT driver